
目次 Contents
【今後のHAKUTOはどうなるのか?】
2018ね1月24日発表、優勝チームなしで、月面探査レースが終了となり、HAKUTO袴田武史代表は、語る、「優勝をゴールとしてきたので、今回の結果については残念。多くの支援した人に大変申し訳なく思っている」。
HAKUTOは、レース終了後も民間による月面探査の挑戦の歩みはやめないとしています。とコメントした。
【優勝チームなしで終了】
2018年1月24日、主催するアメリカの財団は、ことし3月末の期限までにどのチームも月面に到達できないまま、レースが終了する見通しになったと発表。
主催する財団は23日、ことし3月末の期限までに月面に到達する見込みのチームはなく、勝利チームがないまま、終了する見込みになったと発表。
現在、日本から宇宙での資源開発を目指すベンチャー企業や大学の研究者などでつくるチーム「HAKUTO」のほか、アメリカやイスラエルなどのチームが参加していますが、いずれのチームも賞金は受け取れないという。
【残念なお知らせ】
2018年1月11日、世界初の月面探査レースに参加している日本のチーム、「HAKUTO」はインドのロケットを使った月面探査車の打ち上げがレースの期限となっていることし3月末までに行えなくなったと発表。
インドのチームから、打ち上げを行うインド政府の機関と調整がつかず、期限内のロケットの打ち上げが困難な状況になったため。
「HAKUTO」ではレースを主催するアメリカのXプライズ財団に期限の延長を要望し、あらゆる手段を検討して、レース続行の可能性を探っている状況となりました。
ほぼ打ち上げはできない!残念なお知らせでした。
「HAKUTO」(ハクト)日本では初めて、民間による宇宙開発を目指している団体だったのを初めて知りました。
月面探査レース「Google Lunar XPRIZE」に日本から唯一参戦しているチームだったのです。
レース参戦チーム?
そう、Googleがスポンサーとなり、XPRIZE財団によって運営される月面探査の国際賞金レースだったのです。
世界10か国以上から16の民間チームが参戦した人類初の月面探査レース。
1969年にニール・アームストロングが月の大地を踏みしめてから47年後、月への熱い思いを持ったチームが参加している。
2017年1月に、レースの「最終フェーズ」に進む5チームが発表され、今回HAKUTOが打ち上げ予定。
この5チームから優勝が決まる。
【最終フェーズ5チーム】
1.日本:HAKUTO
2.アメリカ:Moon Express
3.インド:Team Indus
4.イスラエル:SpaceIL
5.国際混合チーム:Synergy Moon
民間組織による月面ロボット探査を競い、優勝チームには2000万ドル(日本円:約20億)の賞金が付与されるのです。
準優勝:500万ドル。賞金総額3000万ドル。
正式名称:ホワイトレーベルスペース(White Label Space)。
日本を中心とした、「多国籍の学術機関・民間機関」が協力する、民間のチーム です。
HAKUTOは、Google Lunar XPRIZEによる「モビリティサブシステム中間賞」を2015年1月に受賞し、賞金50万ドルを獲得しております。(ローバーが宇宙空間でも機能する性能を持つことを証明したことによる)
本来なら2017年12月28日(木)に月面ローバー「SORATO」の打ち上げを予定していたが、延期となり来年2018年3月末までにミッション達成を目指しています。
HAKUTOの魅力を調べてみました。
HAKUTO
ミッション 3つ
1、月面にロボット探査機を無事に着陸させること。
月の「雨の海」に着陸させる。
2、着陸地点から500メートル以上移動すること。
月の昼の表面温度100℃以上、夜はマイナス150℃以下の温度環境下でクレーターと岩山を避け移動する。
3、高解像度の動画や静止画データを地球に送信すること。
ローバーに搭載された360度の景色をHDカメラで撮影し、動画と静止画を地球に送る。
この3つのミッションが勝敗を決める。
HAKUTOの歴史
2007年9月、Googleが「Google Lunar XPRIZE」立ち上げる。
2008年4月、HAKUTOチームエントリーする。
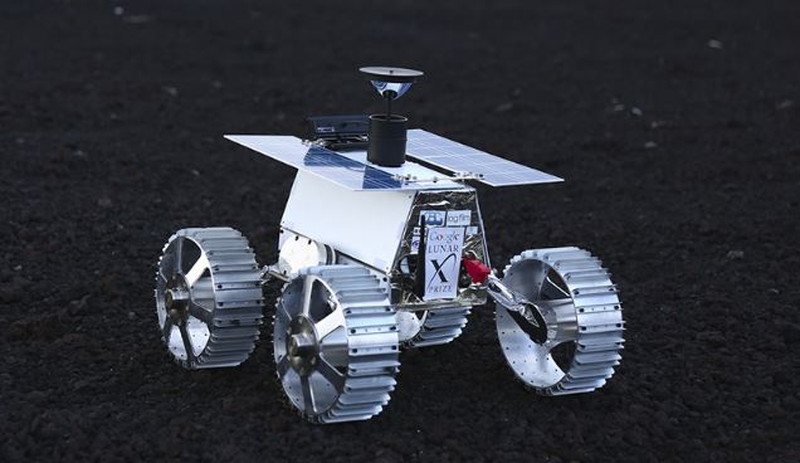
2011年8月、『PM1』プロトタイプモデル1完成。
月面探査ミッションにあわせて10kgに設計した4輪タイプの小型軽量ローバー。
上部に突き出た360度見渡せるカメラを装備している。

(出典元:HAKUTO様HPより) PM1画像
2012年4月、『PM2』プロトタイプモデル2完成。
PM1改良モデル、伊豆大島の火山灰地帯で走行実験を行う。
(出典元:HAKUTO様HPより) PM2画像
2013年4月、『PM3』プロトタイプモデル3完成。
小型2輪タイプローバー、静岡県の中田島砂丘で実験、「Google Lunar XPIRZE」の月面ミッションを地上で達成した。
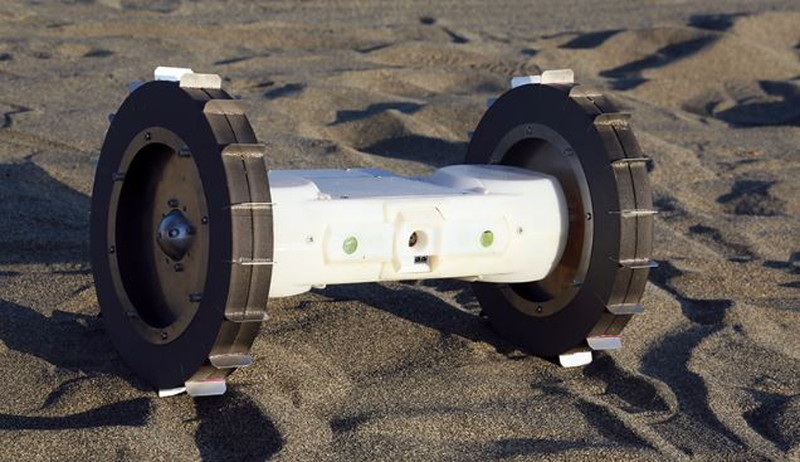
(出典元:HAKUTO様HPより) PM3画像
2013年12月、『EM』エンジニアリングモデル完成。
4輪タイプのローバーと2輪タイプのローバーをテザー(細いロープ)で繋ぎ、デュアルローバーシステムを構築させ、静岡県中田島砂丘で実験する。

(出典元:HAKUTO様HPより) EM画像
2014年8月、『PFM1』プリフライトモデル1完成。
振動試験・熱真空試験を経て、宇宙環境に耐えうることを証明。
(出典元:HAKUTO様HPより) PFM1画像
2015年1月に、Google Lunar XPRIZEモビリティサブシステム中間賞を受賞する。
2015年2月、打上げ計画発表する。
2015年8月、『PMF2』プリフライトモデル2完成。
さらなる小型・軽量化のため1台構成となる。
(出典元:HAKUTO様HPより) PFM2画像
2015年10月、『PMF3』プリフライトモデル3完成。
熱収支のシミュレーションをもとに、ボディ外面の銀テフロンコーティングを検証。
Google Lunar XPRIZE チームサミット、東京で開催される。
(出典元:HAKUTO様HPより) PFM3画像
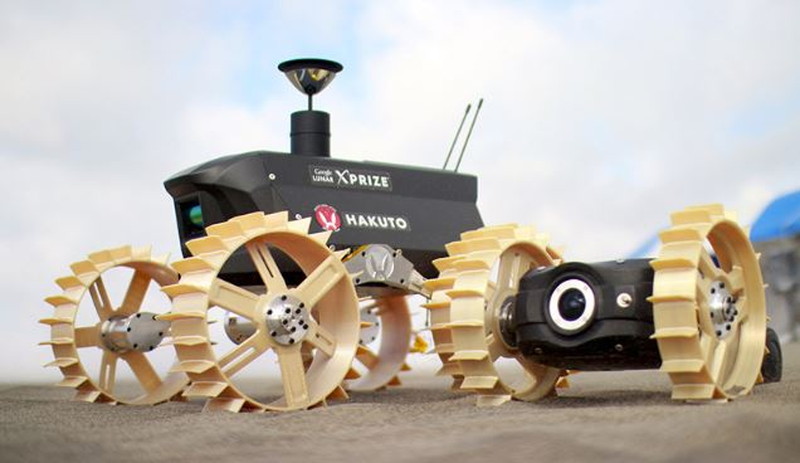
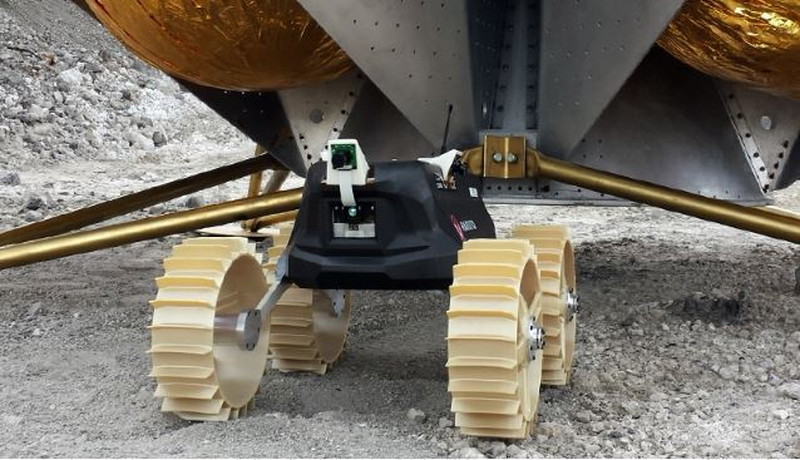
2016年8月、『FM』フライトモデルのデザインが発表される。
ミッションに最適化したデザインで、実際に打上げるモデル。

(出典元:HAKUTO様HPより) FM画像
2018年1月~3月、打ち上げ予定。
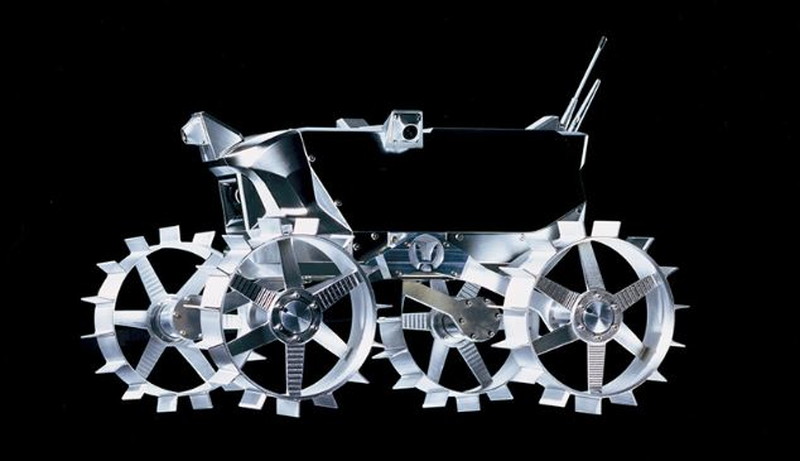
HAKUTOの超小型・軽量ローバー「SORATO」概要
打ち上げ費用:1kgあたり100万ドル以上。
寸法:縦580×横536×高さ358mm。
重さ:4.0kg。
パーツには、様々な民生部品が活用されている。
生命の通信は、900MHz採用し、遠距・高速離通信を搭載している。
ボディは、軽くて強い、温度(‐40℃~100℃)に耐える構造。
砂地でもスリップせず、坂道、方向転換も安定走行が可能。
赤外線センサーで障害物も検知し方向を見極める。
HAKUTO 三本柱のチーム
HAKUTOのメンバーは約60人。
チームリーダーである袴田武史さんが社長を勤めるベンチャー企業「ispace」、「東北大学吉田研究室』、「プロボノ」と呼ばれるボランティアメンバーの三本柱で構成されている。
大学の研究技術を基盤として、民間宇宙業界、宇宙関連以外の業界からのプロフェッショナルをチームとして研究・開発に取り込んでいる実績ある組織である。
HAKUTO 資金調達
すごいのは、民間だけで宇宙開発を目指すということで、国の援助は全く受けていないこと。
「Google Lunar XPRIZE」で優勝するために、10億円を目標に資金を集めている。
企業からの支援、個人でも加入できるのがすごい。
「HAKUTO SUPPORTERS CLUB」に入れば、特典がつき、打ち上げの一員になった気分を味わえるはず。
クルー会員:10,000円(特典全て)
サポーター会員:1,000円(一部特典)
いずれも2018年3月31日のGoogle Lunar XPRIZEレース終了まで募集を受け付けているので、気になる方は是非入会して応援しようではありませんか。(2018年9月 入会は終了しています)
おわりに
わくわくドキドキのHAKUTO宇宙挑戦、まずは発射成功し月レースで優勝願っております。
身近な月レース?となるのでしょうか?
幸運を!
その他 生活関連
→ソニー犬型ロボット「aibo」の歴史「アイボ最新モデル特別抽選は2018年1月14日」までにaiboニュースメール登録が必要
→爆弾低気圧は毎年10月から1月冬の嵐、2月から3月の春一番の時期が最も多いので注意が必要です
→2018年のスーパームーン!最大の満月と最小の満月「最大満月は1月2日」「最小満月は7月28日」なので見逃してはいけいない
→あおり運転は免停規定適用されたがこれで大丈夫なのか?いやがらせ対策や脅し予防法!
→あおり運転は免停規定適用されたがこれで大丈夫なのか?いやがらせ対策や脅し予防法!
関連記事





コメント
-
2017年 12月 30日
-
2019年 12月 26日


この記事へのコメントはありません。